|
Hung-Jui (Joe) Huang I am a 5th-year Ph.D. student at CMU RI, co-advised by Prof. Michael Kaess and Prof. Wenzhen Yuan. I am generally interested in robotics, computer vision, and machine learning. My research is about superhuman tactile sensing, including actively estimating physical properties and creating high-resolution 3D reconstructions. Recently, I completed a six-month internship at Google DeepMind in London, where I worked on multimodal vision-language-action (VLA) models for contact-rich manipulation tasks. I received my B.Sc. in EECS at MIT. During my undergrad, I worked with Prof. Gregory Stein and Prof. Nicholas Roy. After B.Sc., I worked at ISEE for two years with Dr. Chris Baker and Prof. Ying Nian Wu. In the past, I have worked on robot navigation and self-driving trucks. I am named a Presidential Fellow at CMU and my research is supported by the Paul and James Wang/Sercomm Presidential Scholarship. Email / CV (May 25) / Scholar / Github |

|

DeepMind
Student Researcher
July 25 - Jan. 26
CMU
Ph.D. in RI
Aug. 21 - Present

ISEE
Research Engineer
Aug. 19 - May 21
Nvidia
Intern
Jun. 18 - Aug. 18

MIT
B.Sc. in EECS
Sep. 14 - Jun. 19
Publications |
|
|
GelSLAM: A Real-Time, High-Fidelity, and Robust 3D Tactile SLAM System
Hung-Jui Huang, Amin Mirzaee, Michael Kaess, Wenzhen Yuan Under Review project page / paper / code / dataset / bibtex Extremely high-fidelity, real-time 3D reconstruction using only tactile input. |
|
|
GelBelt: A Vision-based Tactile Sensor for Continuous Sensing of Large
Surfaces
Amin Mirzaee, Hung-Jui Huang, Wenzhen Yuan RA-L, 2024 project page / paper / video / bibtex Our tactile sensor is designed for efficient, continuous scanning over large surfaces. |
|
|
NormalFlow: Fast, Robust, and Accurate Contact-based Object 6DoF Pose Tracking with
Vision-based Tactile Sensors
Hung-Jui Huang, Michael Kaess, Wenzhen Yuan RA-L, 2024 Best Poster Award, ICRA 2025 Dexterity in Multi-Fingered Hands Workshop project page / paper / code / dataset / bibtex Real-time, robust, and accurate tactile-based tracking for novel objects, including low-textured ones like ping pong balls and eggs. Useful for manipulation, in-hand manipulation, and 3D reconstruction tasks. |
|
|
FusionSense: Bridging Common Sense, Vision, and Touch for Robust Sparse-View
Reconstruction
Irving Fang*, Kairui Shi*, Xujin He*, Siqi Tan, Yifan Wang, Hanwen Zhao, Hung-Jui Huang, Wenzhen Yuan Chen Feng, Jing Zhang, ICRA, 2025 project page / paper / code / bibtex Robot reconstructing visually and geometrically accurate surroundings with sparse visual and tactile data. |
|
An Intelligent Robotic System for Perceptive Pancake Batter Stirring and Precise
Pouring
Xinyuan Luo*, Shengmiao Jin*, Hung-Jui Huang, Wenzhen Yuan [IROS Best Entertainment and Amusement Papers Finalists] IROS, 2024 project page / video / paper / bibtex Our pancake preparation robot integrates advanced sensory and control algorithms to mix batter with precise uniformity, estimate its properties, and pour it into specified shapes. |
|
|
Kitchen Artist: Precise Control of Liquid Dispensing for Gourmet Plating
Hung-Jui Huang, Jingyi Xiang, Wenzhen Yuan ICRA, 2024 project page / video / paper / bibtex Our sauce plating robot can precisely control the thickness of squeezed liquids on a surface, even when dealing with unseen liquids. |
 |
Estimating Properties of Solid Particles Inside Container Using Touch
Sensing
Xiaofeng Guo, Hung-Jui Huang, Wenzhen Yuan IROS, 2023 paper / project page / bibtex Estimating solid particle properties (e.g., size and shape) inside a container using tactile and force-torque sensing. |

|
Understanding Dynamic Tactile Sensing for Liquid Property Estimation
Hung-Jui Huang, Xiaofeng Guo, Wenzhen Yuan RSS, 2022 video / project page / paper / bibtex High-precision liquid viscosity and volume estimation using only tactile sensing. Our approach can even estimate sugar concentration within water based on slight viscosity variations. |
|
|
Planning on a (Risk) Budget: Safe Non-Conservative Planning in Probabilistic
Dynamic Environments
Hung-Jui Huang, Kai-Chi Huang, Michal Čáp, Yibiao Zhao, Ying Nian Wu, Chris L. Baker ICRA, 2021 video / paper / bibtex A planning algorithm with guaranteed bounds on the probability of safety violation, which nonetheless achieve non-conservative performance. Tested on a self-driving truck in a real-world environment. |
|
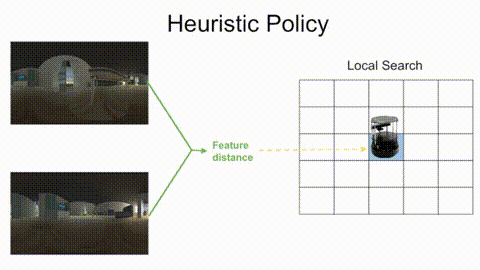
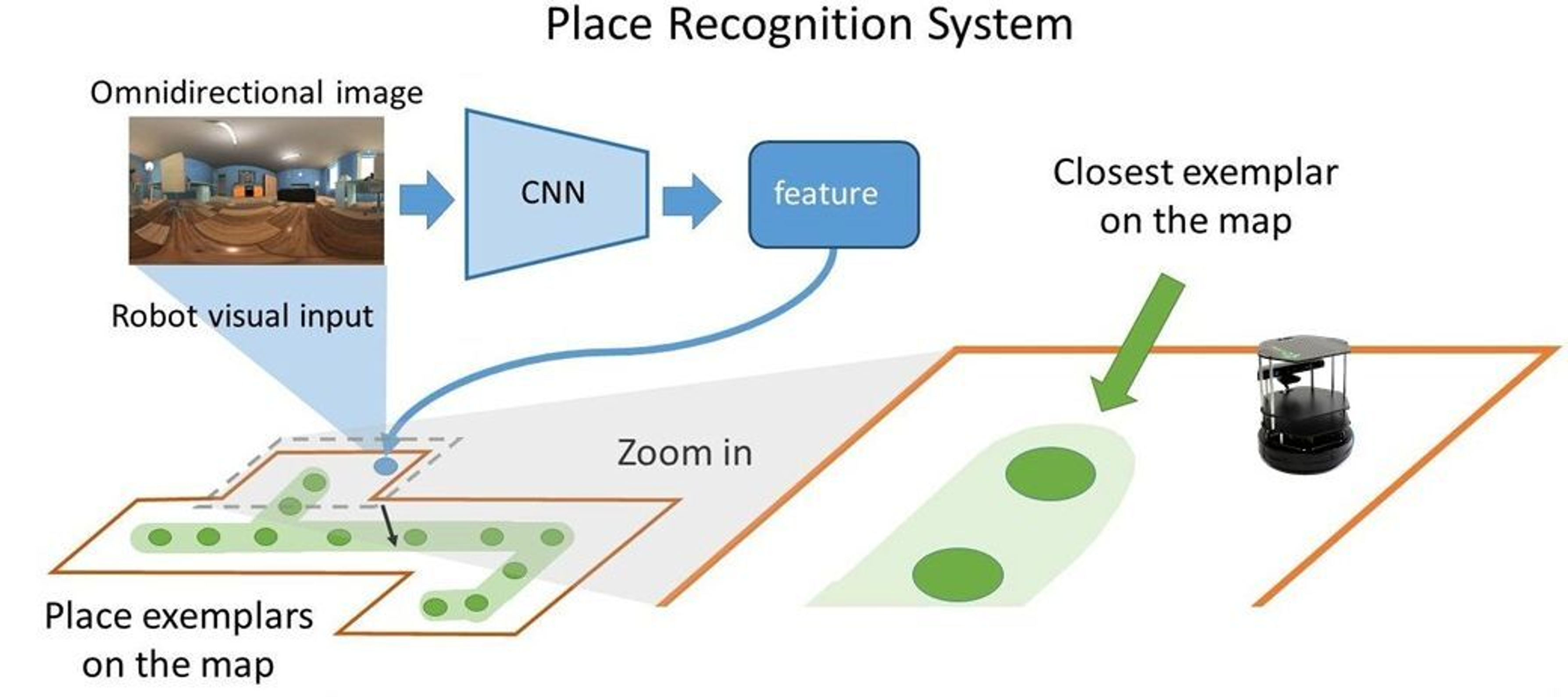
Omnidirectional CNN for Visual Place Recognition and Navigation
Tsun-Hsuan Wang*, Hung-Jui Huang*, Juan-Ting Lin, Chan-Wei Hu, Kuo-Hao Zeng, Min Sun (* indicates equal contribution) ICRA, 2018 project page / video / code / paper / bibtex O-CNN compares omnidirectional visual images to a database of images to determine the robot's location and helps navigation. |
Teaching |
|
I served as a teaching assistant for the following courses. CMU 16-720 Computer Vision (Spring 2024) MIT 6.141 Robotics: Science and Systems (Fall 2018) |
Miscellanea |
|
My chinese name is 黃泓睿 and it pronouced like "Huang-Hung-Ray". 😀 |
|
Copyright © 2023 Made by Joe |